数学和计算机科学板块_辛酸网
数据结构与算法13
BY TSherry
迪杰斯特拉算法是一种典型的贪心算法,用于在一个图中求取从某结点出发到其它每一个结点的最短路径。 这里的最短路径不是指路径长度的最短,而是所带有的边上权重之和最小。这个算法的核心原理是这样的:如果有结点s,t,r, 并且我们已经找到了s→t的最短路径和t→r的最短路径,那么这两条邻接一合并就是s→r的最短路径。

就像这幅插图,这里面的箭头指的不是边而是指三条不同的路径。这里有s,r,t三个结点, 三条路径具备各自长度la,lb,lc。图中的结点s可以用路径a以la的距离到达结点t, 也可以先经过路径b去结点r再通过路径c抵达结点t。那么后者就有lb+lc的距离。 如果la<lb+lc则最短路径肯定不是先走b再走c的这一条,也许是直接走a的那条最短,也许不是; 而反过来要是la>lb+lc的话,那直接走a肯定不是最短的,但先b后c的路径也不一定是最短的。 不过一旦我们引入这样一个前提:
如果从s到t不能经过r,则此时允许的最短的路径是a
如果从s到t一定需要经过r,则此时允许的最短的路径是先b后c
这时我们能发现一个有趣的事实:从s到t要么经过r要么不经过,所以整体而言这两条路径必然有一条是最短路径, 我们只要比较大小,看看la与b+lc取那个小的就是答案。
但如何确保此种前提条件成立呢?若是,t,r都邻接,那么请问这两条路径哪一个相对更短呢? 只需比较la与b即可。因为一旦la<b的话,光是b就比a长了 再走上c的距离肯定更远是不行的。反之则不一定,还得参考lc。 因此对于一个起点s,若有结点t与之邻接,我们可以另一个同样与s邻接的结点r,看s直接到t是不是比s先去r再到t更近, 如果是,那么s→t的最短路径就是直达,否则,我们就要在后面考虑有没有更短的。
算法过程如下:
准备工作
首先,确定算法的起点是一个结点s,到自身距离为0
设立结点集合P表示尚未查出最短路径的结点集合,T表示已经查出的最短路径的结点集合。
除了起点s在T中外,其它所有结点都放在P中。
与s邻接的结点,已知最短距离为和s之间的边的权重。剩下的结点,已知最短距离皆为∞
开启循环:
从P中选取已知最短距离相对而言最小的那个,暂名为t
认定s→t的路径最短只能是这么短,无法再短。移t入T
遍历P中剩余所有结点
对这其中的每一个结点,暂名为r
取【s→r的已知最短距离】,与【(s→t的最短路径距离)+(t→r一步到位的距离)】,比较大小
如果【(s→t的最短路径距离)+(t→r一步到位的距离)】更小,用其替代【s→r的已知最短距离】在P中
第二层循环结束
如果P空,T满,则第一层循环结束
观T,其中记载了s到图中每一个结点的最短路径
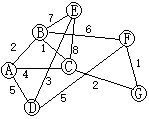
看例子,研究结点A到其它所有结点的最短路径有多短。
| 轮次 | P | T | 当前发现最短路径 |
| 1 | B2直达 C4直达 D5直达 E∞不通 F∞不通 G∞不通 | B2 | B2,直达 |
| 2 | C3自B D5直达 E9自B F8自B G∞不通 | B2 C3 | C3,自B |
| 3 | D5直达 E9自B F8自B G5自C | B2 C3 D5 | D5,直达 |
| 4 | E8自D F8自B G5自C | B2 C3 D5 G5 | G5,自C |
| 5 | E8自D F8自B | B2 C3 D5 G5 E8 | E8,自D |
| 6 | F8自B | B2 C3 D5 G5 E8 | F8,自B |
这个过程表格中,每一步我们都要把每一个结点中当前已知的最短的路径下, 要走的是一个结点是什么记下来。当然,已知的最短的路径有多短也要记下来。这样做的目的在于, 在最后可以反向构造出最优解。我们不仅能知道A到每一个结点的最短路径有多短,还能知道怎么走才能这么短。
最优解内容如下:
到B,直达,距离2
到C,路径ABC,距离3
到D,直达,距离5
到E,路径ADE,距离8
到F,路径ABF,距离8
到G,路径ABCG,距离5
该算法是有适用范围的,不是所有图均可,条件如下: ①没有多重边,要不然你得先把多重边合并,权值取最小的那个;②没有环,要不然算法会转来转去无穷无尽; ③权重大于等于0,否则在负权值的干扰下算法同样会转来转去没完没了
辛酸网 ©版权所有